
Model-based dense air pollution maps from sparse sensing in multi-source scenarios
A. Nebenzal, B. Fishbain & S. Kendler
Abstract
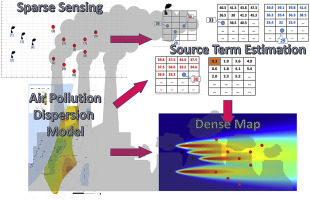 A method for producing dense air pollution maps, based on any given air-pollution dispersion model, is presented. The scheme consists of two phases. At the first stage, sources’ locations and emission rates, i.e., source term estimation, as a function of the model’s parameter space are sought (“backward computation”). Then, the source term is used to generate the dense maps utilizing the same dispersion model (“forward computation”). The algorithm is model-invariant to the dispersion model and thus is suitable for a wide range of applications according to the required accuracy and available resources. A simulation of an industrial area demonstrated that this method produced more accurate maps than current state-of-the-art techniques. The resulting dense air pollution map is thus a valuable tool for air pollution mitigation, regulation and research.
A method for producing dense air pollution maps, based on any given air-pollution dispersion model, is presented. The scheme consists of two phases. At the first stage, sources’ locations and emission rates, i.e., source term estimation, as a function of the model’s parameter space are sought (“backward computation”). Then, the source term is used to generate the dense maps utilizing the same dispersion model (“forward computation”). The algorithm is model-invariant to the dispersion model and thus is suitable for a wide range of applications according to the required accuracy and available resources. A simulation of an industrial area demonstrated that this method produced more accurate maps than current state-of-the-art techniques. The resulting dense air pollution map is thus a valuable tool for air pollution mitigation, regulation and research.
Code
Please find the MATLAB package here. The zip file contains both files the generate the test site – CreateData.m. The test site consists of 4 sources and 9 sensors, located downwind. The measured data is based on the gaussian plume model. To locate the last source, execute the main.m script. This process is quite computationally intensive. for intel i7 with 32gb ram memory, it took about 4 hours. The file Maim.m contains the manager class of the model. FindSources.m contains a class that calculates the contribution of each source and sensor on the entire grid.
The entire process is managed by two infrastructure files: API.m – calculating the Gaussian model. and the Configuratiom.m is the config file.
To generate an interpolation map based on the results, you should use – CreateInterpolationMapForMoreThenOneSource.m.
One should pay attention to the parameters of the grid – Here the grid size is 1200×1200 and the grid-scale should be 3. If required the parameters can be changed in the configuration.m file.
Please cite the following paper in any future publication using this package: A. Nebenzal, B. Fishbain, S. Kendler, “Model-based dense air pollution maps from sparse sensing in multi-source scenarios”, Environmental Modelling & Software, 128:104701, 2020.